


導入事例Introduction Example
位置検知でナットランナーの締めミスを未然に防ぐポカヨケシステム
2020.06.24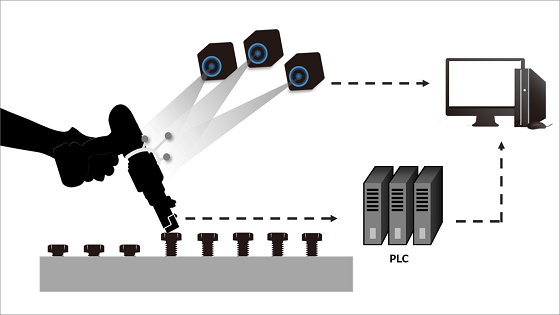
ナットランナーを使用したネジの締め付け作業が手順通りに実行でき、かつ正しく締め付けが完了しているか判定。モーションキャプチャ「OptiTrack」でナットランナーの位置をセンシングしているため、締め付けが完了しない限り、次の工程に移行できないよう制御される。
導入前の課題
現在PLCと連動しているが、人が作業しているため締め付け忘れを防ぎきることができずにいました。この課題を解決するために、作業がどこまで完了しているか進捗管理ができ、かつ、指定の作業が終わらないと次の作業に進めないようにしたいと考え、本システムを導入。
導入効果と今後の展望
本システムでは、ソフトウェア上で、工具がワーク上のどの位置にいるかをリアルタイムに表示することも、締め付け済の箇所を色を変えて表示することも可能です。座標系をワークに合わせ、ワークのCAD図面や2D図面をリアルタイムに表示しながら作業することが可能なため、作業の進捗が可視化でき、チェックにかかる工数を削減します。
システムの概要
締め付け作業において、手順ミスを未然に防止し、手順通りに漏れなく完了しているかを監視するため、モーションキャプチャカメラ「OptiTrack」を活用します。
ナットランナーにはセンサー(反射マーカー)を貼付し、「OptiTrack」でそのセンサーの位置情報を取得しています。位置の正誤判定を行うために、一度ナットランナーで仮締めを行います。PLC連携でその信号を受け、指定位置内にナットランナーの先端があるかを判定。範囲内であれば、締め付けを開始。範囲外の場合は、自動的に制御され、締め付けが不可となります。
導入事例 検索
お問い合わせInquiry
お客様の課題に合わせてスタッフが最適な解決します。
製品の修理や故障、技術的なお問い合わせはサポートからお問い合わせください。